| Все для программирования. |
| начало | почта | статьи | файлы | ссылки | сайты | RSS | о нас | опубликовать | оформление | авторы | друзья | реклама |
|
Каталог статей
|
Статья
Угловой энкодер: устройство и процедуры обработки данных © Dale, 26.02.2012 — 28.02.2012. Прежде всего мне хотелось бы извиниться перед читателями, ожидающими продолжения статьи "Многозадачность во встроенном приложении", если таковые имеются (постоянно растущий счетчик прочтений свидетельствует о наличии читательского интереса к ней, хотя отсутствие отзывов все же вносит легкую ноту сомнения в этом). Дело в том, что эта и предшествующие ей статьи были замечены, и я получил приглашение поучаствовать в некотором достаточно интересном для меня стартапе, относящемся к автоматизации промышленного оборудования для малого бизнеса. Естественно, я не мог упустить шанс попробовать новые для меня технологии в реальном деле. Продолжение статьи обязательно увидит свет в недалеком будущем, причем теперь будет возможность постепенно смещать акцент от заведомо вымышленных задач в сторону вполне реальных. В основу настоящей статьи легли материалы из отчета, выполненного автором в ходе предварительных исследований по вышеупомянутому проекту. Выдержка из него, относящаяся к измерению угла поворота вала при помощи энкодера, представлена на суд читателей. Оглавление
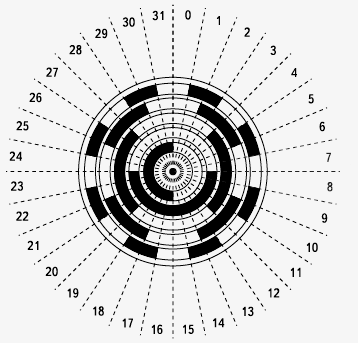
1. Применение углового энкодера При автоматизации производственных процессов часто приходится решать задачу точного прямолинейного механического перемещения различных узлов автоматизируемой установки (рабочего инструмента станка, координатного стола и т. п.). Одна из простейших реализаций привода для линейного перемещения состоит из вала с нарезанной на нем точной резьбой и гайки, перемещающейся при вращении вала. Если шаг резьбы достаточно равномерный, а люфт гайки невелик, то координата гайки однозначно определяется углом поворота вала относительно некоторого начального положения. В качестве датчика угла поворота вала можно использовать прибор, называемый угловым энкодером. 2. Устройство и принцип работы Теоретически принцип работы углового энкодера чрезвычайно прост. Прибор включает жестко закрепленный на валу диск с делениями, каждое из которых однозначно определяет некоторый диапазон положений вала, и устройство для считывания этих делений. 2.1. Способы считывания делений диска Считывание делений диска может производиться различными способами: механическими контактами (которые размыкаются лепестками на диске), оптическими датчиками (в этом случае диск состоит из чередующихся прозрачных и непрозрачных областей, если считывание производится на просвет, либо отражающих и неотражающих областей, если считывание производится в отраженном свете), магнитными датчиками (например, Холла), электромагнитными и т. п. Механические контакты подвержены износу (и вследствие этого недолговечны), а в изношенном состоянии еще и склонны к дребезгу, поэтому их применение возможно лишь для некритичных приложений (типа регулировки громкости в музыкальном центре или выбора режима микроволновой печи). Применение их в качестве датчика координаты для станка отпадает. Магнитные и электромагнитные датчики лишены этих недостатков (во всяком случае, механический износ им не грозит). Однако их изготовление своими руками при приемлемом разрешении довольно проблематично (по крайней мере, мне неизвестны практичные конструкции таких датчиков). Наиболее пригодными для самостоятельного изготовления при приемлемом качестве представляются оптические энкодеры (этот тезис я намерен в ближайшее время проверить на практике). Впрочем, дальнейшее изложение в равной степени относится к любым способам считывания, разве что при механическом ожидается существенный дребезг контактов. 2.2. Способы кодирования положения диска Как уже упоминалось ранее, положение (угол поворота относительно некоторого исходного состояния) диска кодируется путем чередования двух типов областей, отчетливо различимых при помощи специальных датчиков (для оптического энкодера это прозрачные и непрозрачные области). Существует два принципиально различных способа такого кодирования: абсолютный и инкрементальный. В соответствии с этим и сами угловые энкодеры можно разделить на абсолютные и инкрементальные. 2.2.1. Абсолютный энкодер Диск абсолютного энкодера разбивается на некоторое количество секторов (чаще всего, но не всегда, это количество является степенью двойки). Сектора разбиваются на концентрические дорожки, каждая из которых представляет один бит кодированного номера сектора (рис. 1).
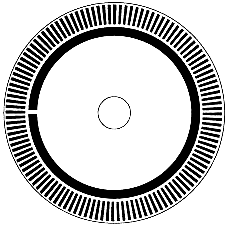
В данном примере абсолютный энкодер имеет 32 сектора. Соответственно, для их кодирования нужно log2(32) = 5 дорожек. Номера секторов обычно задаются кодом Грея. На каждую дорожку диска необходим отдельный датчик. 2.2.2. Инкрементальный энкодер Как следует из самого названия, инкрементальный энкодер определяет не абсолютное положение диска в пределах полного оборота, а относительное смещение от предыдущего положения. Для этого достаточно диска с единственной дорожкой (рис. 2).
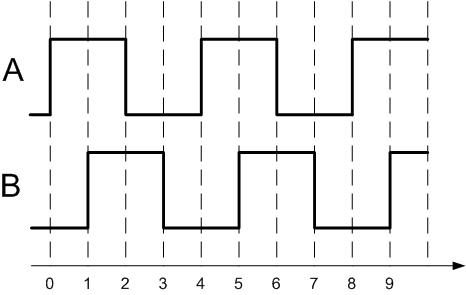
Часто добавляют вторую дорожку с единственным делением на полный оборот. Эта дорожка позволяет выставить диск в начальное положение, относительно которого впоследствии будут производиться отсчеты. Она также может оказаться полезной в процессе диагностики энкодера, позволяя проконтролировать количество импульсов, выдаваемое датчиком за один оборот диска. Подсчитывая количество импульсов от датчика, можно определить угол поворота диска относительно предыдущего положения; однако невозможно определить направление вращения диска. Для определения направления используется второй датчик, смещенный относительно первого на четверть шага (половину ширины штриха или промежутка между ними). По разности фаз сигналов датчиков определяется направление вращения диска (подробнее далее). 2.3. Сравнение абсолютного и инкрементального энкодеров Обе разновидности углового энкодера имеют свои достоинства и недостатки. Абсолютный энкодер можно опрашивать в любой момент, когда потребуется узнать положение диска, а не обрабатывать перемещение на каждый шаг. Это упрощает работу с ним (в частности, делает тривиальным определение направления вращения диска), а также снижает требования к контроллеру, обрабатывающему данные о координатах (если контроллер потеряет несколько импульсов от датчиков, информация о текущем положении диска все равно будет доступна). К недостаткам абсолютного энкодера в первую очередь следует отнести сложность изготовления, связанную с наличием большого числа датчиков (по одному на каждую дорожку диска, то есть на каждый разряд кода угловой координаты диска). Также в случае высокой точности энкодера (и, как следствие, большого количества разрядов данных) для подключения энкодера к контроллеру потребуется большое число линий связи и такое же число битов ввода (в случае параллельной передачи данных) либо затраты на дополнительное оборудование сериализации (в случае последовательной передачи). В случае инкрементального энкодера достоинства и недостатки меняются местами по сравнению с абсолютным. Достоинствами являются: простота (всего два датчика вне зависимости от разрешения), относительная легкость при кустарном изготовлении, малое количество линий связи с контроллером. Недостатки: высокие требования к быстродействию контроллера (в случае потери импульсов от датчиков в данных о координате будет накапливаться ошибка), более высокая сложность обработки данных (из-за необходимости определения направления вращения диска). Поскольку программировать мне гораздо привычнее, чем изготавливать точную механику, а быстродействие примененных в проекте микроконтроллеров AVR более чем достаточно для такой задачи, то достоинства инкрементального энкодера в данном случае превысили его недостатки, поэтому выбор между возможными вариантами был сделан в его пользу. Далее речь пойдет исключительно об инкрементальном декодере, поэтому тип энкодера я больше уточнять не буду. 3. Простейшая процедура обработки сигналов декодера Прежде чем приступить к рассмотрению процедур обработки сигналов декодера, выясним, что представляют собой эти сигналы. Как уже говорилось ранее, декодер имеет два датчика: A и B. Датчики сдвинуты друг относительно друга на половину ширины штриха (или четверть шага диска), поэтому сигналы получаются сдвинуты по фазе на p/2. Примем для определенности, что сигнал B отстает от сигнала A при повороте диска против часовой стрелки:
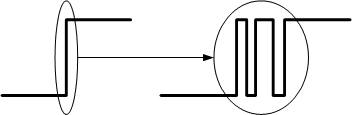
Из рис. 3 видно, что при движении диска против часовой стрелки (состояния 0-1-2-3-4...) в момент перехода сигнала A из состояния 0 в 1 (передний фронт) сигнал B всегда находится в состоянии 0 (см. состояния 0, 4, 8). Если же диск движется по часовой стрелке (7-6-5-4-3...), сигнал B всегда находится в состоянии 1 (состояния 6, 2). Отсюда вытекает простейшая процедура обработки сигналов декодера: по переднему фронту сигнала A проверить состояние сигнала B; если он равен 0, увеличить счетчик координаты на единицу, в противном случае уменьшить его на единицу. Эта процедура применяется в подавляющем числе конструкций, опубликованных в интернете. Он вполне пригоден для применения в некритичных устройствах, когда погрешность определения координаты не приводит к фатальным последствиям: не так давно вытесненные оптическими роликовые мыши/трекболы, валкодеры магнитол и т. п. Однако он не годится для применений, в которых точность определения координаты является решающим фактором, например, в системах ЧПУ. Причина несовершенства такой, казалось бы, простой и надежной процедуры кроется в том, что он требует сигналов идеальной формы. В реальных условиях датчики могут иметь «дребезг» при смене состояния сигнала (особенно это относится к датчикам с механическими контактами). В этом случае вместо четкого перехода 0→1 на осциллограмме сигнала мы увидим последовательность из нескольких быстрых переходов:
В результате дребезга приращение координаты будет произведено несколько раз вместо одного, и значение координаты будет безнадежно испорчено. Для борьбы с дребезгом применяются разнообразные методы. Большинство из них примитивны и сводятся скорее к «заметанию мусора под ковер» — от аппаратного подавления дребезга фильтром НЧ (RC-цепью) до запрета реакции на последующие переходы сигнала до истечения некоторого тайм-аута, в течение которого, по замыслу авторов, дребезг должен заведомо прекратиться. Этот подход представляется неубедительным, поскольку основан на компромиссе: если тайм-аут окажется слишком коротким, остается риск, что дребезг будет принят за действительный сигнал; если же для надежности сделать его слишком длинным, есть опасность потерять действительные импульсы при быстром движении диска. Таким образом, решение оказывается слишком тесно привязанным к свойствам конкретного датчика и плохо масштабируемым по скорости вращения диска. Впрочем, даже если бы удалось избавиться от дребезга полностью, проблема все равно не была бы решена. Предположим, что диск находится в положении между точками 3 и 4 на рис. 3 (назовем такую точку 3.5). При перемещении в точку 4.5 в точке 4 сигнал A переходит из 0 в 1, и согласно нашей процедуре координата диска увеличивается на единицу (поскольку сигнал B равен нулю на переднем фронте импульса A). Затем диск возвращается из 4.5 обратно в 3.5, но, поскольку при обратном движении диска в точке 4 сигнал A переходит из 1 в 0, наша процедура игнорирует это событие. Итак, имеем: диск переместился на небольшой угол и вернулся в исходное положение, а координата увеличилась на единицу. Можно повторять такое перемещение произвольное число раз, и координата каждый раз будет увеличиваться. В итоге координата диска, измеренная посредством простейшей процедуры, не будет иметь ничего общего с истинным положением диска. Аналогичная проблема возникнет в случае, если диск будет совершать колебания между точками 5.5 и 6.5, только в этом случае измеренное значение координаты будет уменьшаться. Проблема является достаточно актуальной, поскольку вероятность остановки диска на границе между светлой и темной зонами достаточно велика, а вибрации при работе промышленного оборудования в сочетании с возможным люфтом привода вполне могут привести к колебаниям диска, достаточным для смены состояния датчика A. Это делает простейшую процедуру обработки сигналов по переднему фронту сигнала A непригодной для ответственных применений, где требуется максимальная точность измерения координаты диска. 4. Модификации процедуры Для повышения достоверности данных о координате диска процедуру обработки данных следует модифицировать. Далее приведены два варианта модифицированных процедур. 4.1. Реакция на оба фронта сигнала A Как мы видели ранее, причиной некорректного результата простейшей процедуры являлась его реакция лишь на передний фронт сигнала A. По этой причине процедура «не замечала» обратного отката диска и не корректировала координату в сторону уменьшения. Наиболее очевидный способ устранить эту ошибку — заставить процедуру реагировать на оба фронта сигнала A:
Наша модифицированная процедура реагирует на фронты сигнала A, приходящиеся на нулевое состояние сигнала B. Для повышения разрешающей способности энкодера вдвое мы можем доработать ее таким образом, чтобы использовались все фронты сигнала A:
У данной процедуры остается одна уязвимость: если для реакции на фронты сигнала A используется прерывание, на время его обработки контроллер перестает реагировать на другие фронты, что может привести к ошибке при наличии дребезга сигнала. Поэтому потребуется либо установить фильтр низких частот на входе прерывания по смене состояния сигнала A (с постоянной времени больше, чем время обработки прерывания), либо отказаться от прерываний вовсе и опрашивать состояние обоих сигналов по таймеру. Во втором случае следует аккуратно выбрать частоту таймера, чтобы не происходила потеря импульсов при быстром движении диска. 4.2. Симметричная процедура В предложенных ранее процедурах сигнал A использовался в качестве основного, сигнал B — в качестве вспомогательного. Все события отслеживались только на канале A. На самом деле деление сигналов на A и B условно, они вполне взаимозаменяемы. Попробуем отойти от такого искусственного деления и рассмотреть сигналы как равноправные:
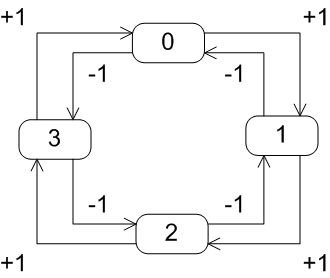
Если рассмотреть комбинацию значений <BA> как двухразрядное двоичное число, получаем циклическую последовательность: 00 — 01 — 11 — 10 — 00 … В обычном двоичном представлении, когда каждый разряд представляет соответствующую ему степень двойки, эта последовательность интерпретируется как 0 — 1 — 3 — 2 — 0 … и не несет большого смысла. Но если рассмотреть эту последовательность как код Грея, она представляется гораздо более осмысленной: 0 — 1 — 2 — 3 — 0 … Соответственно, при обратном направлении вращения диска (по часовой стрелке) эта последовательность принимает вид 0 — 3 — 2 — 1 — 0 … Такие последовательности очень похожи на смену состояний некоего конечного автомата:
В данном случае получилась своеобразная «автоматная модель наоборот»: обычная модель показывает переходы и действия, которые моделируемый автомат произведет при подаче на него соответствующих сигналов; в нашем случае действия производятся по факту состоявшегося перехода. Для программной реализации процедуры отсчета координаты удобно воспользоваться табличным представлением диаграммы переходов:
Здесь:
Достоинства процедуры: простота реализации; способность обнаруживать потерю импульсов. Недостатки: в случае работы по прерываниям задействуются два входа внешних прерываний контроллера, что может оказаться излишне расточительным; кроме того, в отсутствие аппаратного подавления дребезга фильтром нижних частот возможна слишком высокая частота прерываний с возможной потерей некоторых импульсов (и, как следствие, потерей точности измерения координаты). 5. Выводы
|
| начало | почта | статьи | файлы | ссылки | сайты | RSS | о нас | опубликовать | оформление | авторы | друзья | реклама |